GAIT ANALYSIS DEVICES, METHODS, AND SYSTEMS
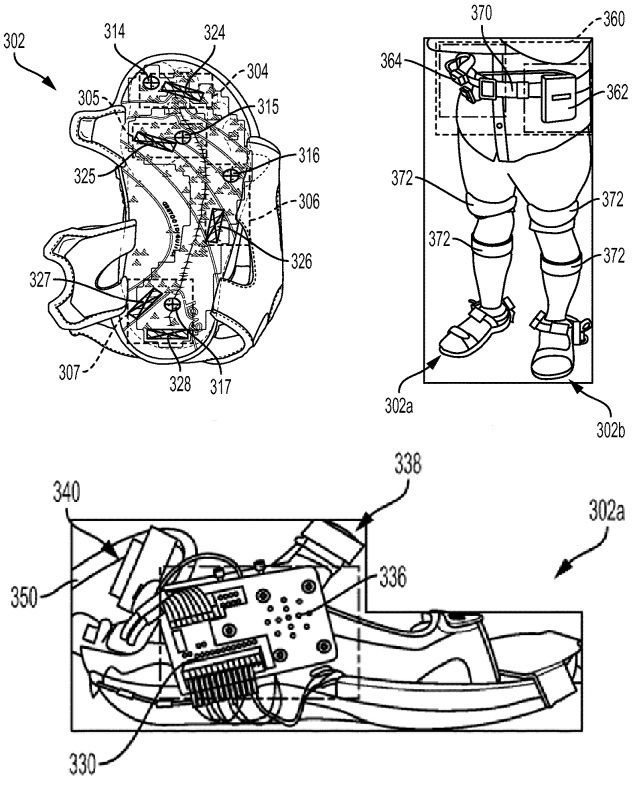
Con este dispositivo se puede medir parámetros de la marcha como la presión plantar y los ángulos del tobillo, además cuenta con un sistema de alarma de sonido que a base del análisis de los parámetros biomecánicos de la marcha se activa cuando hay un riesgo de caída. El dispositivo está conformado por dos unidades de calzado y un módulo de procesamiento unido a un cinturón. Las unidades de calzado miden la presión debajo del pie y los datos cinemáticos del pie. Los datos son enviados de forma inalámbrica a una computadora portátil conectada al cinturón. Para medir los ángulos de las articulaciones se usan unidades de medida inerciales (IMU), uno de ellos puede ser ubicado en la unidad de calzado en la suela con el eje Z ortogonal a esta, apuntando hacia abajo y el eje local X y alineado con el eje longitudinal de la unidad de calzado. El segundo se ubica en la espinilla de la pierna, está unido con un velcro y el eje X del IMU se alinea con el eje longitudinal de la tibia y su eje Z es dirigida posteriormente. Con los IMUs se puede obtener la orientación de pie y la espinilla con respecto a sus respectivos marcos de referencia, estos datos son suficientes para derivar los tres ángulos de tobillo (abducción/aducción, inversión/eversión y flexión plantar/dorsal), estos ángulos pueden ser generados a tiempo real gracias a un procesador.